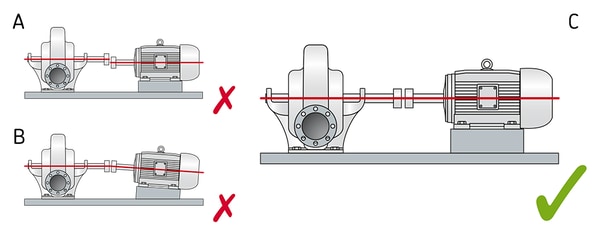
針對情況或資產的對齊工具錯誤?需要一個更有經驗的用戶來完成這項工作嗎?當試圖用激光軸對準解決方案來診斷和校正機械未對準時,可能會出現許多復雜性,而這些解決方案并不是針對這一挑戰而構建的。
在一次網絡研討會上,產品經理介紹了四個“激光軸對準中最昂貴的陷阱——以及如何避免它們”。
工程師并沒有要求任何人降低期望值。他敦促用戶選擇自適應對準系統,以獲得激光系統的這些好處,
?降低泵維修
?密封件更換減少
?軸承壽命周期增加
?降低功耗
他指出,使用激光系統的經驗可以大大有助于預測和避免對準過程中的常見錯誤。但自適應對齊工具能夠更好地引導新用戶,因為它具有避免陷阱的校正功能,可以快速獲得精確的測量結果。
示例1:初始錯位
線路過長會影響探測器的測量范圍。換言之,分離距離越長,可以測量到的偏差就越少。這種復雜性可能出現在許多不同的設置中,從檢修電機到使用具有預設目標的機器,例如風力渦輪機。
陷阱:使用基本的雙激光和傳感器對準系統,并不總是能夠測量機器的初始位置。這種困境迫使用戶采用粗略的對齊程序,因此無法記錄“原始”對齊狀態。
建議:自適應對準系統采用單激光技術,有助于緩解這種情況。經理指導我們在單激光系統中使用定格,以避免激光超出測量范圍。

圖2:使用定格測量機器的初始位置。
示例2:聯軸器間隙/齒隙
齒隙或聯軸器間隙是一種常見的機械現象,當聯軸器具有較高的扭轉靈活性以避免無意中損壞從動機械時會發生這種現象。
陷阱:聯軸器彎曲或間隙會影響對齊測量,因為相對聯軸器軸位置的變化會改變Y傳感器的值。在測量過程中,當激光從左到右移動或“浮動”時,頭之間的這些差異會影響測量結果,降低精度。
建議:如果您的激光對準工具具有主動態勢智能軟件——自適應系統的另一個關鍵功能——請使用“掃描”測量模式自動檢測耦合齒隙數據。然后讓激光對準工具和軟件分析從計算中刪除這些數據。

圖3:使用數據質量增強來覆蓋由耦合間隙/齒隙引起的不良數據
示例3:耦合軸與非耦合軸對齊
這里的問題是:從哪里開始對齊?是當機器耦合還是非耦合?
經理說:“如果你有一臺錯位的機器,你試圖用螺栓將聯軸器固定在一起,你會有一些殘余力和摩擦力需要處理。”。
陷阱:如果您使用耦合安裝的軸應用程序進行測量,則可以有效地測量負載/彎曲的軸。如果你沒有測量機器的確切卸載位置,那么在你移動這些值后,你就無法完全糾正錯位。這種情況對于雙激光系統來說尤其具有挑戰性。
建議:如果您有帶防摩擦軸承的軸對準應用程序和初始未對準,請拆下輪胎聯軸器元件,將其非耦合對中,然后重新連接聯軸器。在對準過程中,使用非耦合PASS模式,這是自適應對準系統中的另一種功能。只需旋轉軸,讓單個激光器和傳感器頭相互穿過,因此當頭處于相同的相對角度位置時,測量點會自動獲取。

圖4:非耦合對齊和非耦合軸意識。
示例4:移動式機器
回到線路過長的困境。如果在對準過程中需要移動機器,您會移動哪一端?
陷阱:如果您在打開激光的情況下移動機器,由于線路過長,您可能會很快滑出傳感器檢測器的范圍,迫使您在繼續重新定位機器之前停止并重新測量。不幸的是,對于雙激光系統,可移動和固定機器上總是有激光和傳感器頭。
建議:由于單激光技術,如果你移動機器的傳感器,而不是激光,問題就不會發生。不會出現線路過長的問題,并且激光器在實現完全測量的同時,保持在傳感器檢測器范圍內。因此,單個激光器應始終安裝在固定機器的軸上。

圖5:移動機器的傳感器端與激光端。
工程師斷言,用戶完全有權期望他們的激光對準系統產生快速、一致和高精度的結果。有時候訣竅是知道陷阱在哪里。